
Por meio do Programa Institucional Voluntário de Iniciação Científica (Pivic/UFLA), o estudante de Engenharia de Controle e Automação Matheus Alves Silveira vem desenvolvendo um robô hexápode. A construção desse equipamento, que funciona com uma bateria de 6.6 volts, envolveu várias etapas que foram do estudo à montagem, a fim de chegar a um robô capaz de se locomover de diferentes formas – automaticamente, detectando obstáculos e desviando deles, ou por controle remoto, através de comandos pré-definidos.
O projeto é multidisciplinar, visando o avanço do conhecimento em áreas como robótica, eletrônica, programação e sistemas embarcados (sistemas eletrônicos nos quais há um microcontrolador completamente dedicado ao dispositivo ou sistema que controla). Por exemplo, os “olhos” do robô são na verdade um módulo de ultrassom onde um atuador emite um sinal sonoro de alta frequência e um sensor recebe de volta, dando ao equipamento a capacidade de detectar a distância de obstáculos e a faculdade de desviar deles. Assim, é possível avaliar na prática o funcionamento desse tipo de sensor.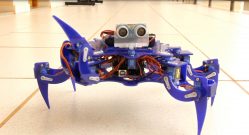
Matheus desenvolveu a parte mecânica e eletrônica do robô, assim como aprimorou um software para a plataforma Arduino, microcontrolador de código livre utilizado para a sua locomoção. Os movimentos são produzidos por 19 motores – três em cada pata, que permitem uma articulação parecida com a de um inseto; e um para o movimento do sensor de ultrassom. Para a criação dos movimentos, o estudante baseou-se em projetos similares. A avaliação do consumo energético também é outra área passível de estudo, assim como o aprendizado para a implementação de códigos para o controle de robôs.
“Esse é um projeto bem amplo. A partir do que já fizemos, é possível implementar outras funções”, diz Matheus. O desenvolvimento de outras funcionalidades para o robô será explorado em seu trabalho de conclusão de curso.
O estudante é orientado pelo professor Wilian Soares Lacerda, do Departamento de Ciência de Computação da UFLA (DCC). “A locomoção de um robô por patas envolve mais complexidade que a de um robô com rodas. E permite o seu deslocamento em terrenos mais acidentados”. Assim, o professor enxerga diferentes aplicações para um robô dessa espécie: “Um robô hexápode pode ser utilizado para a exploração e mapeamento de ambientes hostis, inatingíveis para seres humanos, como em cavernas. E mesmo para a detecção de problemas em dutos, que seria uma atividade arriscada para humanos”.